[VIP第1年] 指数:3
[VIP第1年] 指数:3
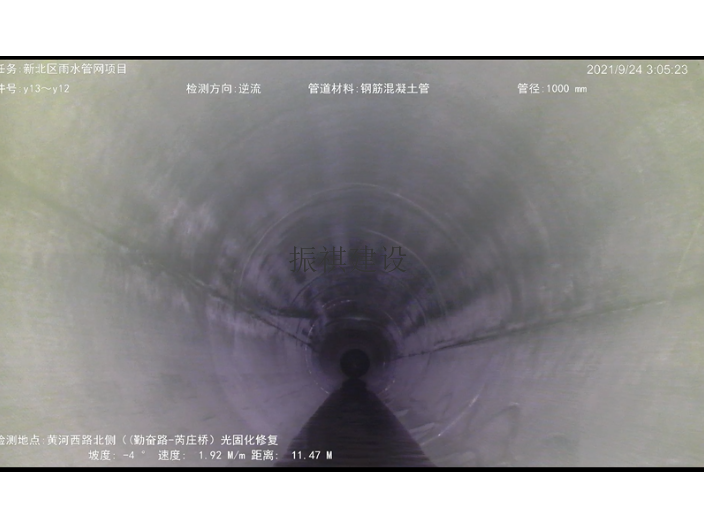
管道检测机器人验收的注意事项如下:1.对摄像头进行性能检测。我们在做管道CCTV检测的时候,机器人的镜头旋转和成像清晰度是很重要的。所以摄像头应具有电动旋转,径向360度无限旋转,仰俯2*135度旋转,可自由调整高度,并具有变焦、调节灯光强度等功能。2.对爬行器进行性能检测CCTV管道机器人的价格并不便宜,采购单位应优先选择具有适应多种复杂管道环境的设备。所以除了要测试爬行器的前进后退、空挡和变速、以及防侧翻等功能,还要测试爬行器的越障功能和防水功能。破裂1级:管壁材料轻度剥落。镇江开挖修复管道检测与评估咨询报价

检测机器人的主机连接主机可以通过有线或无线两种方式与电缆盘连接,但是同时使用有线和无线与电缆盘连接时可能会有计数值跳动的异常。因此在选择一种连接方式后,需要关闭另外一种网卡适配器。为获取更好的图像效果,推荐使用有线连接。开启软件在设备连接成功后,需要稍等约30秒开启软件,过早的开启软件,可能会出现“摄像头登陆失败”、“爬行器连接失败”之类的问题,软件开启后,可能没有图像。这属于正常现象,只需要关闭软件,稍等片刻,重新启动即可。镇江污水管道检测与评估询问报价破裂3级:小型异物穿越整个管道,管壁上形成上下或左右两个破口。

管道机器人设备在实施检测的过程中,应根据规范要求操作设备,在遇到障碍物时,应该降低抬升高度(降低重心),调整车速,防止翻车。如果障碍物较大,应该暂停爬行,评估爬行器能否爬过,如若不能,应停止检测,以免发生翻车风险。如遇爬行器被障碍物卡住的情况,先停止爬行,将电缆线从电缆盘上拉出1到2米,然后再开始爬行,如仍然不能够通过,可先后退,然后调整方向反复尝试。在实施检测的过程中,请选择合理的灯光亮度,避免光源过度发热。管道机器人设备在实施检测的过程中,应根据规范要求操作设备。在遇到障碍物时,应该降低抬升高度(降低重心),调整车速,防止翻车。如果障碍物较大,应该暂停爬行,评估爬行器能否爬过,如若不能,应停止检测,以免发生翻车风险。如遇爬行器被障碍物卡住的情况,先停止爬行,将电缆线从电缆盘上拉出1到2米,然后再开始爬行,如仍然不能够通过,可先后退,然后调整方向反复尝试。在实施检测的过程中,请选择合理的灯光亮度,避免光源过度发热。
管道机器人设备使用时选择合适功率的电源,电源功率选择如果不合适,可能会导致工作时系统掉电,推荐使用市电、1KW以上发电机、峰值功率1KW以上的移动电源等。主机连接主机可以通过有线或无线两种方式与电缆盘连接,但是同时使用有线和无线与电缆盘连接时可能会有计数值跳动的异常。因此在选择一种连接方式后,需要关闭另外一种网卡适配器。为获取更好的图像效果,推荐使用有线连接。开启软件在设备连接成功后,需要稍等约30秒开启软件,过早的开启软件,可能会出现“摄像头登陆失败”、“爬行器连接失败”之类的问题,软件开启后,可能没有图像。这属于正常现象,只需要关闭软件,稍等片刻,重新启动。管道破损请找江苏振祺建设工程有限公司。
管道检测爬行机器人使用注意事项2:10、检查机器人的连接器,确保连接器没有损坏;11、检查机器人的外壳,确保外壳没有损坏;12、检查机器人的控制程序,确保控制程序正常工作;13、检查机器人的管道,确保管道没有损坏;14、检查机器人的安全装置,确保安全装置正常工作;15、检查机器人的控制系统,确保控制系统正常工作;16、检查机器人的程序,确保程序正常工作;17、检查机器人的硬件,确保硬件正常工作;18、检查机器人的软件,确保软件正常工作;19、检查机器人的管道,确保管道没有损坏;20、检查机器人的安全装置,确保安全装置正常管道CCTV检测系统,通过爬行器在管道内爬行,对管道内的管道接口问题等缺陷进行摄像和评估。镇江开挖修复管道检测与评估有哪些
变形轻度,管道变形率小于等于5%,并且管道无任何破损。镇江开挖修复管道检测与评估咨询报价
管道检测修复主要包含以下两个方面:1、功能性检测:管道检测修复的排水管道功能性检测主要是以检查管道排水功能为目的的检测,一般检测管道的有效过水断面,并将管道实际过流量与设计流量进行比较,以确定管道的功能性状况。2、结构性检测:管道检测修复的排水管道结构性检测主要是以检查管道材料结构现状为目的的检测,这类检测主要了解管道的结构现状以及连接状况,通过综合评估后确定管道给地下水资源及市政设施是否带来影响。对于这类结构性问题被检测出来后一般需要通过管道检测修复的手段来解决。镇江开挖修复管道检测与评估咨询报价
文章来源地址: http://jzjc.chanpin818.com/gccb/qtgccb/deta_24108661.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。